Ⅰ. 영역 기반 정합 방법
- 윈도우 간의 상관도(= 정합 비용, 비유사도)를 기반으로 계산하여 시차를 계산하는 방법이며, 다양한 알고리즘이 존재한다. 그 중에서도 SAD(Sum of Absolute difference)는 매우 널리 알려진 알고리즘이다. 그래서 본 장에서는 SAD를 설명하며, 이와 거의 유사한 SSD(Sum of squared difference)도 같이 짧게나마 설명하겠습니다.
Ⅱ. SAD(Sum of Absolute Difference)
- 좌/우 윈도우 내 존재하는 픽셀들의 값의 차이에 절대값을 취한 후, 합산하여 정합 비용을 계산합니다.
- 아래의 그림을 보면 쉽게 이해 가능합니다.
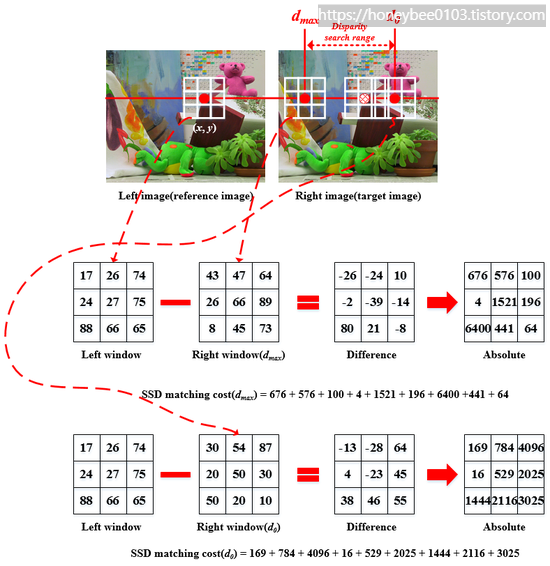
+ 기준 영상(좌측 영상)의 한 점과 목표 영상(우측 영상)의 시차 탐색 범위(disparity search range) 내 존재하는 모든 픽셀에 대해 윈도우를 설정
+ 좌측 윈도우 하나와 시차 탐색 범위 내 설정된 윈도우들 각각에 대해 절대값 차이를 계산 (아래의 예시에서는 'dmax'와 'd0'에 대한 그림만 그려놓았지만, 실제로는 [max, 0 ] 범위 내 존재하는 픽셀에 씌어진 윈도우들에 대해서도 계산이 이루어져야함)
+ 윈도우들 끼리의 절대값 차이를 계산한 후, 각각의 윈도우들은 계산된 절대값 차이를 합산하는데, 이것을 정합 비용으로 사용 ( 윈도우 내 픽셀 값들의 차이가 크면 클수록 유사하지 않다는 의미를 내포하고 있음)

Ⅲ. SSD(Sum of Squared Difference)
- 좌/우 윈도우 내 존재하는 픽셀들의 값의 차이에 제곱한 후, 합산하여 정합 비용을 계산합니다.
- 아래의 그림을 보면 쉽게 이해 가능하다. (SAD와 거의 유사, 절대값이 아니라 제곱한다는 것만 차이가 있음)
※ 정합 비용을 계산하는 과정이 SAD와 거의 동일하기 때문에 따로 설명하지 않겠습니다!
'영상처리 > Computer vision' 카테고리의 다른 글
| Stereo matching - Global matching (1) | 2022.10.03 |
|---|---|
| Stereo matching - local matching(2) (0) | 2022.10.03 |
| Stereo matching(추가) (1) | 2022.10.03 |
| Stereo Matching (0) | 2022.10.03 |
| Depth & Disparity (2) | 2022.10.03 |




댓글