Ⅰ. Computer vision 이란
- 컴퓨터(로봇)에 인간의 시각 기능을 구현하고자 하는 노력에서 비롯된 분야
- 카메라 혹은 라이다, 레이더로 획득한 영상 정보에서 유용한 정보를 추출하기 위한 기술
- Recognition, Detection, Tracking, 3D Modeling, Stereo vision, robot vision 등 다양한 분야가 있음
- 이중에서 Stereo vision에 대해서 좀더 집중적으로 다루어볼 예정
Ⅱ. Camera model(part 1)
- Stereo vision에서 다루기 전, Camera에 대해서 이해할 필요가 있음
- 통상적으로 Pinhole camera로 모델링을 함(→수학적으로 매우 편하게 정리가 가능해짐)
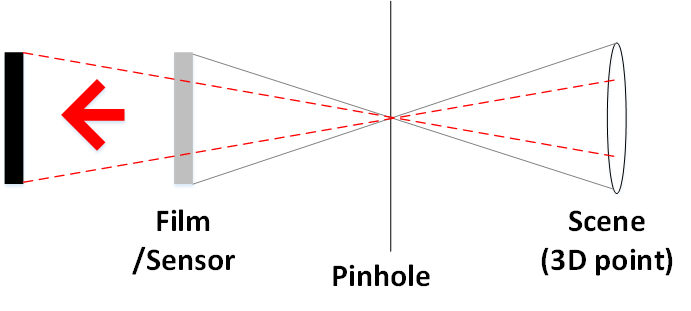
+ 아래는 pinhole camera 모델을 대략적으로 나타내고 있음
(작은 구멍을 통과하여 2줄이 되는 이유는 빛이 퍼짐 떄문)

+ 다시 Pinhole camera 모델을 그려보면 아래와 같이 그릴수 있음
(※ 핀홀모델은 center를 통과하는 모든 광학들은 벗어나지지 않음)
(※ 여기서 scene는 Lens가 아님)
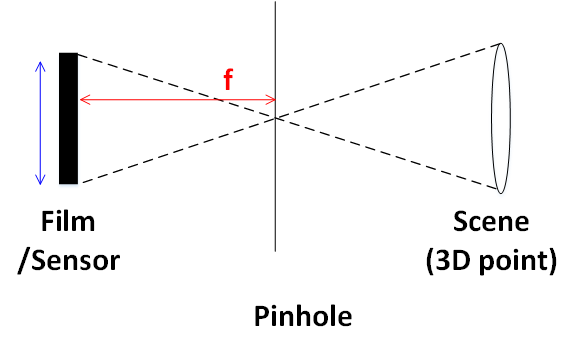
> f : focal length를 의미하며, pinhole로부터 film(*이미지가 맺히는) 까지의 거리를 의미
① 만약 focal length가 2배가 되면, Projected object 크기가 2배가 됨
② 빛이 모이는 양이 1/4로 됨
> 아래의 그림은 film이 뒤로 2배 물렸을 떄에, 영상이 2배 확대 되어져 보임을 의미
> pinhole size의 영향
① 빛은 점에서 나오면서 원의 형태로 퍼짐
② pinhole 이 큰 경우 빛이 계속 겹쳐져서 흐려짐
③ pinhole 이 작은 경우 이미지는 뚜렷해지나, 너무 작게되면 회절현상이 발생
+ 광학 lens
> 모든 광학이 focal length(f)에 위ㅣ하는 평면에 한 점으로 모임
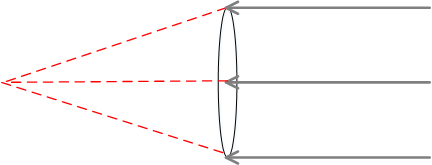
- Ray Trace 방법 (※ 아래 그림 참고)
+ 모든 광학들은 센터를 통해서 시작
+ focal length를 선택
> 이미지가 또렷해질때 까지 찾음 (※ 그림에서 보다 또렷해지는 면이 오른쪽으로 가게도면 원으로 맺혀서 흐리게됨)
> 혼동하지 말것. focal length를 선택하는 것과 초점을 맞춘다 라는 것을 다른 의미
※ focusing : focal length 보다 추가적으로 film/sensor를 움직임
+ scene plane에 대한 focus plane을 결정
→ lens에 평행한 plane에서의 point들로부터 오는 모든 광학선들은 lens에 평행한 또다른 plane에 집중되어짐

'영상처리 > Computer vision' 카테고리의 다른 글
| Stereo vision (0) | 2022.10.01 |
|---|---|
| Image processing(3) (0) | 2022.09.26 |
| Image processing(2) (0) | 2022.09.25 |
| Camera Calibration (0) | 2022.09.22 |
| Camera model(2) (0) | 2022.09.19 |




댓글