이제 영상처리 뿐만 아니라 다른 분야에서도 막대한 영향을 끼친 CNN에 대해서 정리해보고자 합니다.
Ⅰ. CNN(Convolution Neural Network)
- CNN(Convolution Neural Network)는 이미지 인식 분야에서 많이 활용되고 있습니다.
- 이전 포스팅과 달리, 합성곱 계층(Convolution layer)와 풀링 게층(Pooling layer)가 존재합니다.

+ 입력된 영상의 정보가 소실되지 않고 전달되는 것이 특징이며, 이는 매우 중요한 특징이니 반드시 기억하세요!
- 이전에 Fully Connected Layer의 문제점은 입력된 영상의 정보가 무시된다는 것입니다.
+ 이미지의 정보를 무시하고, 모든 입력 데이터를 동등한 뉴런(=같은 차원의 뉴런)으로 취급합니다.
> 예를 들어 보면, EDGE나 TEXTURE는 매우 중요한 특징입니다. 그런데 이를 무시하고 한 픽셀을 단순한 뉴런만으로 취급한다면? EDGE 정보나 TEXTURE 정보가 의미가 없어지겠지요?
- “CONV.” 층의 입출력 데이터를 특징 맵(Feature map)이라고 합니다.
+ 또한, CNN에서는 패딩(Padding), 스트라이드(Stridde) 등의 하이퍼파라미터(hyperparameter)가 존재하는 것을 기억하세요!
이제부터 각 layer와 파라미터가 무엇인지에 대해서 정리해보겠습니다.
Ⅱ. Convolution 연산
- 딥러닝이나 CNN을 공부해보신 분들은 다 아시겠지만, 커널(혹은 필터)가 입력 영상을 슬라이딩 해나가면서 연산을 수행합니다.
- Convolution 연산은 일반적인 필터 연산 처리와 동일합니다.
+ Fully connected layer에서 weight가 CNN에서는 필터의 내부 값이 weight에 해당된다고 보시면 됩니다.
+ 여기서는 Convolution 연산만 표시되어 있지만, 실제로는 Bias에 대한 계산도 있는 것을 잊지말아주세요!
+ 나중에 설명을 드리겠지만, CNN을 Backpropagation을 수행한다는 것은, 각 필터 내의 값을 조정하면서 손실 함수의 값을 최소화 하도록 한다는 것입니다.
- 아래 그림을 보시면 조금더 쉽게 이해 가실 겁니다.
+ 3*3 필터가 5*5 이미지를 슬라이딩하는 것을 보실 수 있습니다.

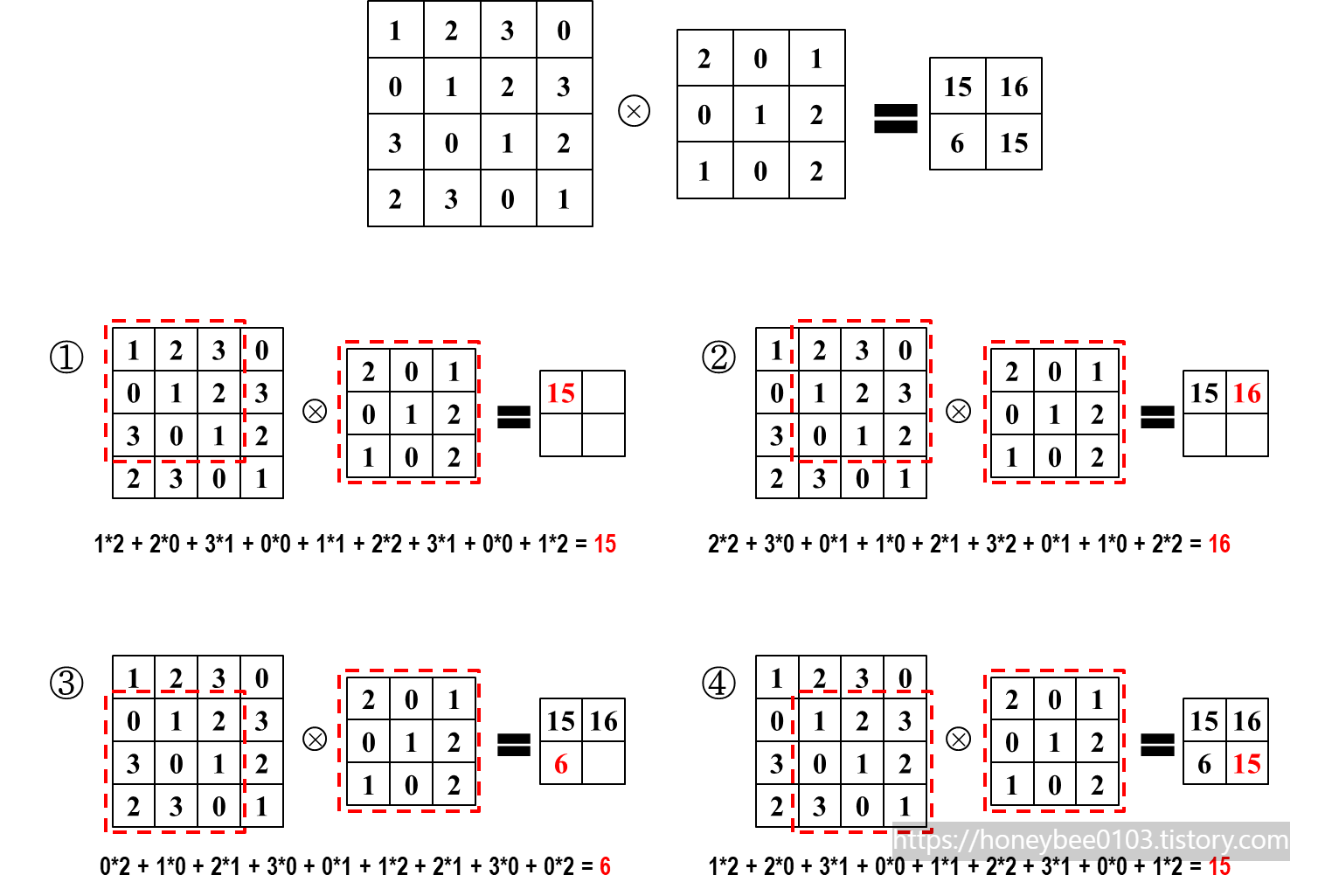
- 저도 예시를 들어 보겠습니다.
+ 아래와 같이 3*3 필터와 4*4 이미지가 있다고 가정합니다.
+ 계산 과정은 아래와 같이 될 것입니다.
+ 눈치채셨겠지만, Convolution의 연산은 MAC(multiply–accumulate) 연산입니다.
Ⅲ. 스트라이드(Stride) 및 패딩(padding)
- 패딩과 스트라이드는 Convolution 연산 시 적용되는 파라미터입니다.
- 패딩(padding) : 입력 데이터의 외곽에 특정한 값으로 채우는 것입니다.
+ 패딩을 통해서, 출력 크기를 조절 가능합니다. Layer가 많은 신경망인 경우, layer가 깊어질수록 출력의 크기가 매우 작아지게 되는 경우가 발생할 수 있는데 패딩을 통해서 이러한 사태를 방지 가능하지요.
- 스트라이드(Stride) : 필터를 적용하는 위치의 간격을 의미합니다.
+ 연산량을 감소시킬 수 있습니다.
- 아래의 그림을 보시면 바로 이해가 가실겁니다. (말 보다는 그림이 확실히 이해가 가죠?)

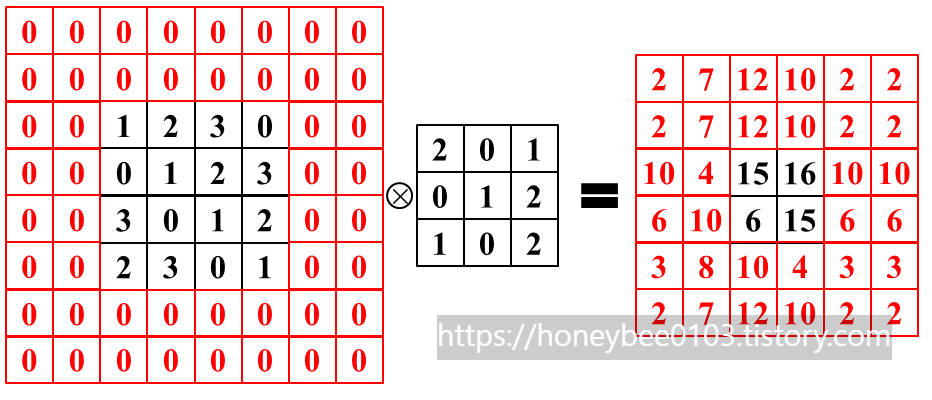
- 그렇다면 패딩과 스트라이드도 예시를 들어 보겠습니다.
+ 패딩 1
> 원래의 이미지에서 1개의 line이 둘러쳐졌습니다.

+ 패딩 2
> 원래의 이미지에서 2개의 line이 둘러쳐졌습니다.
+ 스트라이드 2
> 필터가 1칸씩 움직이지 않고, 2칸씩 움직입니다.
> 또한, 그만큼 skip을 하기때문에 연산량이 줄어드는 것입니다.

Ⅳ. 3D Convolution
- 이제는 2D 이미지 채널이 1인, 즉 Gray 이미지를 다루었다면 3D 이미지 채널이 3인 Color(예를 들면 RGB 이미지) 이미지 연산이 어떻게 되는지 알아 보겠습니다.
- Color 이미지의 경우, Height*Width*Channel 로 구성됩니다.
+ 여기서 아셔야 반드시 숙지하셔야 될 것은 Channel 수와 필터의 수가 같다는 것입니다.
+ 또한, 모든 채널의 필터의 크기는 동일하다는 것입니다.
- 그림의 예를 보시면 바로 아실수 있을 겁니다!



- 앞의 예를 보셨겠지만, 마지막은 출력은 2D 형태로 나오게 됩니다.
+ 출력 feature map의 크기는 패딩, 스트라이드, 필터 크기, 입력 feature map 크기를 알면 계산할 수 있습니다.

> 출력 크기 : (OH, OW)
> 입력 데이터 크기 : (H, W)
> 필터 크기 : (FH, FW)
> Padding : P, Stride : S
- 이것도 예를 들어 보겠습니다.
+ CASE1. 입력 (7,7), 필터 (3,3), P=1, S=1

+ CASE2. 입력 (7,7), 필터 (3,3), P=1, S=2

Ⅴ. 3D OUTPUT 계산, 총 정리
- 3차원 DATA의 표현를 아래와 그림과 큐브 형태로 그릴 수 있습니다.
+ 입력데이터 (C, H, W) / 필터 (C, FH, FW) / 출력데이터 (OH, OW) (※채널, 높이, 너비 순)
+ 입력 데이터의 각 채널과 필터의 각 채널 간 Convolution 연산 후 합산하여 출력합니다.

i. 이제 필터 set를 늘려서 생각해봅시다.
+ 그러면 아래와 같은 형태로 그릴 수 있습니다.
> 필터의 갯수가 "FN"개로 늘어난 것이 보이시나요? 이에 따라서 Output feature map의 수도 "FN"개로 늘어 났습니다!

ii. 이제 input feature map을 늘려서 생각해봅시다
+ 그러면 아래와 같은 형태로 그릴 수 있습니다.
> input feature map의 수가 "N"개로 늘어남에 따라, Output feature map의 set가 "N"개로 늘어난 것을 보실 수 있습니다.

이번 포스팅에서는 CNN에 대해서와 CNN이 어떻게 계산이 되는지에 대해서 알아보았습니다.
'Digital Hardware Design > Deep learning' 카테고리의 다른 글
| CNN - Image2col / reshape (0) | 2022.11.23 |
|---|---|
| CNN 연산량 줄이는 scheme (0) | 2022.11.23 |
| Batch normalization (0) | 2022.11.23 |
| weight 설정 (0) | 2022.11.23 |
| Weight optimization (0) | 2022.11.23 |




댓글